Робот с дистанционным управлением своими руками - Робот Википедия

Робот своими руками
Freelance developer. Поиск Настройки. Время на прочтение 8 мин. Из песочницы. Теги: дельта-робот теория все просто diy робототехника своими руками. Комментарии










Как сделать робота. Для управления двигателями робота необходима микросхема, усиливающая управляющие сигналы малой мощности. Добавив в схему простого робота логический элемент "НЕ", мы получим робота, следующего по линии, всего с одним датчиком. Как самому сделать робота, используя драйвер управления двигателями LD и микроконтроллер ATmega8.


![Добро пожаловать в Вики! [Роботрек вики]](https://storage.googleapis.com/media.amperka.com/projects/abot-robot-part-1/media/part_8/desk_side/part_8_desk_side_screen_2.png "Формулировка задачи")












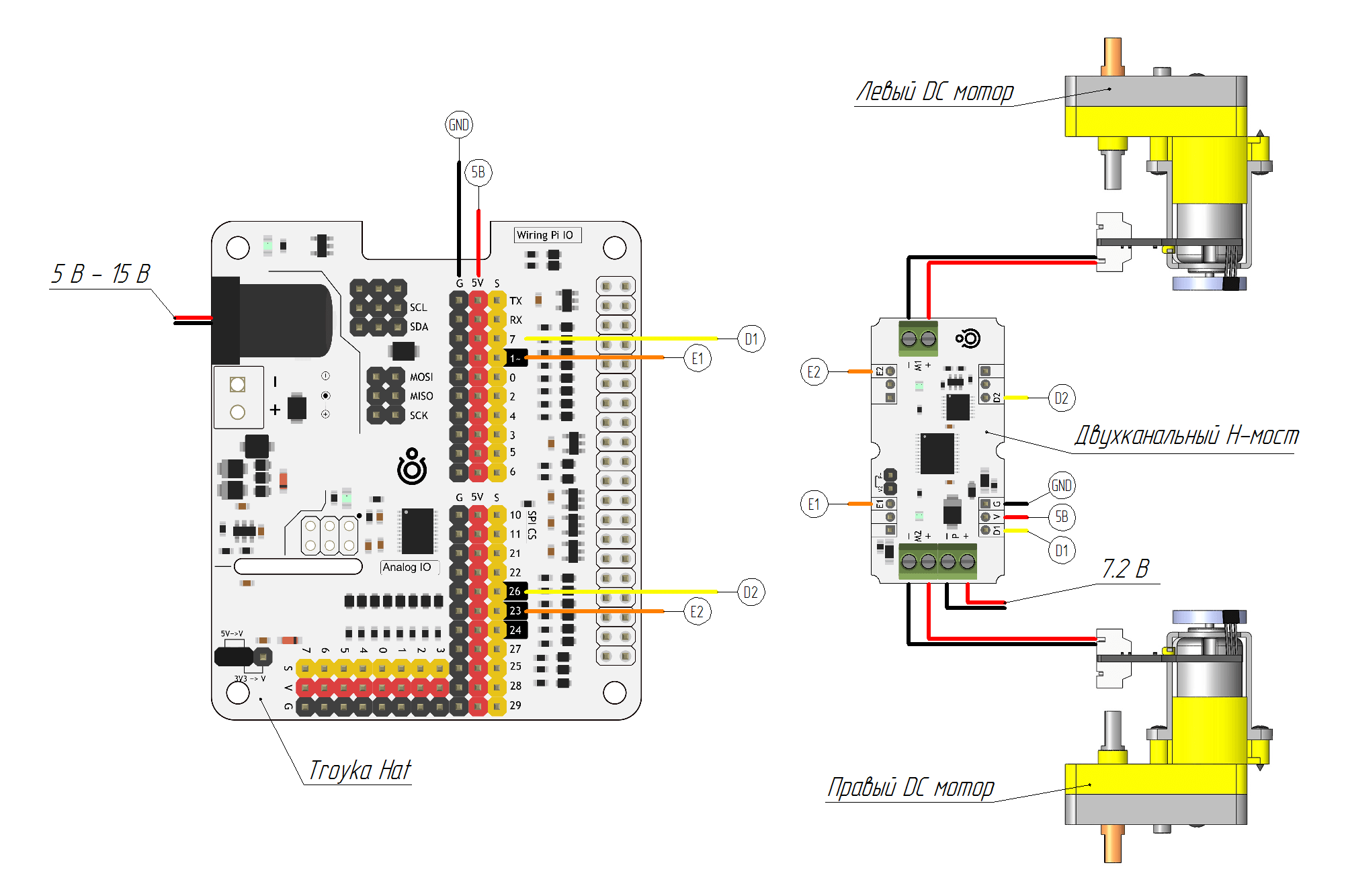
Драйвер LN используется радиолюбителями для многофункционального управления двигателями постоянного тока. Схема модуля, состоящая из двух H-мостов, позволяет подключать к нему один биполярный шаговый двигатель или одновременно два щёточных двигателя постоянного тока. При этом есть возможность изменять скорость и направление вращения моторов. Управление осуществляется путём подачи соответствующих сигналов на командные входы, выполненные в виде штыревых контактов.



_01.jpg/285px-Demining_in_Kharkiv_Oblast_(2022-10-03)_01.jpg)